���{�b�g�J���ɂ�����V�~�����[�^�[���p�ɂ���
�G���W�j�A�����O���ƕ� ��4�{�� ��2���@�l�{ ����

�L�[���[�h
����ɂ��́I�G���W�j�A�����O���ƕ� ��4�{���̕l�{�ł��B
�����O�ł́A�����A�j���̐��E�ł������Ȃ��������{�b�g���A�ߍ��ł͐g�߂ɂ悭�ڂɂ���悤�ɂȂ�܂����B
���郌�X�g�����ł͐H���̔z�V�����{�b�g���s���Ă�����A����ꏊ�ł͕s�R�҂����Ȃ����ǂ����x�����郍�{�b�g���������s���Ă����肵�܂��B�a�@�����ē����郍�{�b�g�Ƃ����̂�����܂����B
���܂��܂Ȑl���s���������A���{�b�g�͂Ԃ���������ړI�̏ꏊ�Ɉړ�����̂�ڂɂ���Ɓu�������Ȃ��v�Ɗ��S���܂��B
����͂���Ȃ��������{�b�g�̊J���ɂ��āA���グ�����Ǝv���܂��B
�ł́A�����������{�b�g�͂ǂ̂悤�ɂ��č���Ă���̂ł��傤���B
�z�V���{�b�g��x�����{�b�g�A�ē����{�b�g�̂悤�Ȉړ����{�b�g�́A���̏�ɂƂǂ܂邱�ƂȂ��{�ݓ����ړ����܂��B���̗����ł́A�l���Q��������Ȃ�����S�Ɉړ����A�ɉ����Đi�ݕ���ς�����悤�ɁA���{�b�g�����Ń\�t�g�E�F�A�������Ă��܂��B
�ߔN�̃��{�b�g�J���ł́A���̓y��Ƃ���ROS 2�ƌĂ��~�h���E�F�A���g���邱�Ƃ������Ȃ��Ă��܂��B
ROS 2�Ƃ�Robot Operating System 2�̗��ŁA���{�b�g�J���Ɍ������I�[�v���\�[�X�̃\�t�g�E�F�A�ł��B
ROS 2��œ��삷��\�t�g�E�F�A�́A���{�b�g�ɑ��āu�ǂ̕����ɁA�ǂ̂��炢�̑��x�œ������v���w�����Ȃ���A�����Ƀ��{�b�g����u���݈ʒu�v�u���x�v�u��Q���܂ł̋����v�Ƃ������������܂��B�����̏������ƂɁA�i�ނ̂��A�Ȃ���̂��A��~����̂��Ƃ��������̍s���f���A�w�����X�V���Ă����܂��B
�������A�����̐l���s�������ꏊ�ŁA�J���r���̃\�t�g�E�F�A���g���Ȃ��烍�{�b�g�������Ƃ͑傫�Ȋ댯���܂��B
������Ƃ�������~�X�ɂ���ă��{�b�g���m���Փ˂�����A�}���i���đz��O�̏ꏊ�ֈړ������肷��\��������܂��B�l�����Ȃ����ԑт����v����ă��{�b�g�����Ƃ������@������܂����A����͊J���̍ŏI�i�K�ōs�����Ƃ��قƂ�ǂł��B���ۂ̊J���ł́A���{�b�g�{�̂��܂��������Ă��Ȃ��i�K����\�t�g�E�F�A�J����i�߂邱�Ƃ����Ȃ�����܂���B
�����ŁA���{�b�g�J���ł̓V�~�����[�^�[�����p����܂��B
���{�b�g�͖��߂����u�ԂɖړI�n�փ��[�v���Ă���킯�ł͂���܂���B
���Ƃ��Δz�V���{�b�g�̂悤�Ɂu2�ԃe�[�u���Ɉړ�����v�Ƃ����w�����o���ꍇ�ł��A���{�b�g�͏������������A�������C�����Ȃ���i��ł����܂��B
�V�~�����[�^�[�̒��ł́A�u������0.001�b��ɂǂ��Ȃ邩�v�u����0.001�b�́v�Ƃ����悤�ɔ��ɍׂ������ԍ��݂Ŗ������v�Z���Ă��܂��B���̂��тɁA���[�^�[�ɂǂꂭ�炢�̗͂�������̂��A�ԗւ͂ǂꂾ�����̂��A���Ƃ̖��C�łǂꂾ���i�ނ̂��A�Ƃ������v�f��ςݏd�˂Čv�Z���Ă��܂��B
���̏����������ɌJ��Ԃ����ƂŁA����������ʏ�Ō���u�Ȃ߂炩�ɓ������{�b�g�v�����藧���Ă��܂��B�ꌩ����Ɠ�����O�Ɍ����铮���̗����ł́A�c��Ȍv�Z���₦�ԂȂ��s���Ă���̂ł��B
�E���[�U�[���o��ʒu�Ɗp�x�����߂�
�E���̕�������u�����Ȃ����v����
�E�ǂ╨�̂ɓ��������ꏊ���v�Z����
�E�����܂ł̋����𐔒l�Ƃ��ďo�͂���
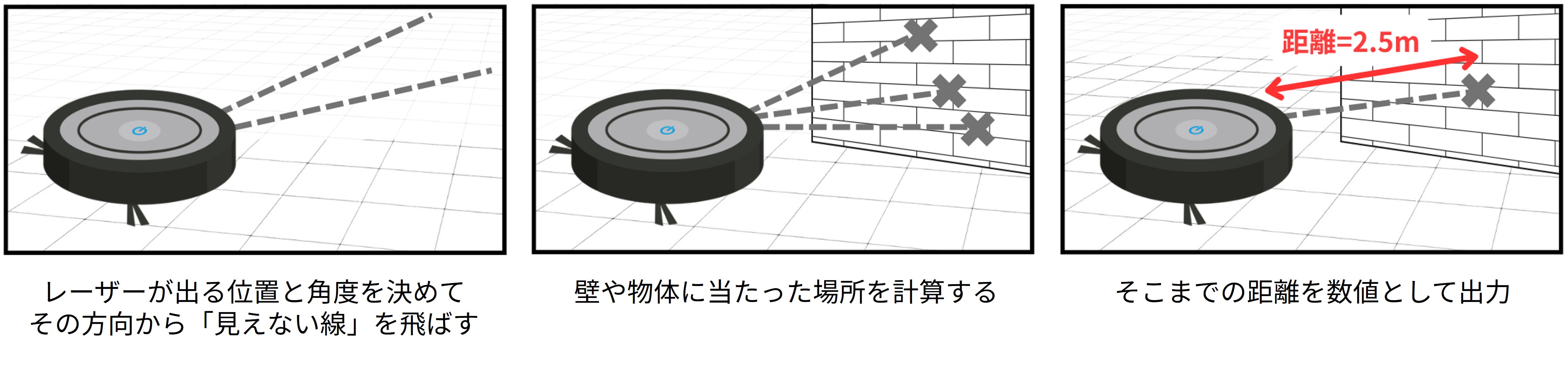
���ۂɃ��[�U�[�����Ǝ˂��Ă���킯�ł͂Ȃ��A�u���̕����ɂ͂��̋����̈ʒu�ɕǂ�����͂�������A�����́���m�v�Ƃ����悤�ɁA�v�Z�ɂ���Č��ʂ����o���Ă��܂��B���̌��ʂ́A���@��LiDAR�Ɠ����`���̃f�[�^�Ƃ��ă��{�b�g�̃\�t�g�E�F�A�ɓn����܂��B
���{�b�g�����猩��ƁA���ꂪ�{���̃Z���T�[�Ȃ̂��A�V�~�����[�^�[��������f�[�^�Ȃ̂��͂قƂ�Nj�ʂ����܂���B����ɂ��A���@�Ɠ����v���O���������̂܂܃V�~�����[�^�[�œ��������Ƃ��ł��܂��B
�V�~�����[�^�[�𗘗p����ő�̃����b�g�́A���S���ƌ����̍����ɂ���܂��B���@�ł́A������Ƃ�������~�X�ɂ��]�|��Փ˂ɂ��j���A�z��O�̋����ɂ�鎖�̂ȂǏ�Ƀ��X�N�������܂��B�������V�~�����[�^�[�Ȃ�A�ǂꂾ�����s���Ă��@�ނ����邱�Ƃ͂���܂���B�p�����[�^�ύX��A���S���Y���̌����e�Ղł���_�́A�J���҂ɂƂ��Ă͑傫�ȗ��_�ɂȂ�܂��B
�܂��A�J�������̖ʂł��V�~�����[�^�[�͗D��Ă��܂��B���{�b�g���P�䂵���Ȃ��ꍇ�A�����l�ł̓����J��������Ȃ�܂����A�V�~�����[�^�[������Ίe����PC��œ��������Č��ł��܂��B
����ɃV�~�����[�^�[�̑傫�ȓ����Ƃ��āA���{�b�g���擾���Ă�����������Ԃ�l�Ԃ��ڂŌ��Ċm�F�ł���_���������܂��B���[�U�[���ǂ̕����ɔ�сA�ǂ��ŏ�Q���ɓ������Ă���̂��A���{�b�g���ǂ̈ʒu�ɂ���ƔF�����Ă���̂��A�쐬���ꂽ�n�}���ǂ̂悤�Ȍ`�ɂȂ��Ă���̂��Ƃ��������́A���@�ł͐��l��O�Ƃ��Ă����m�F�ł��܂���B
����A�V�~�����[�^�[�Ɖ����c�[����g�ݍ��킹�邱�ƂŁA�����̏�����ʏ�Œ����I�ɔc���ł��܂��B����ɂ��A�u�Ȃ����̏�ʂŒ�~�����̂��v�u�Ȃ����̕����i�����Ƃ����̂��v�Ƃ��������{�b�g�̔��f���R��ǂ��₷���Ȃ�܂��B
���̂悤�ȉ����̓f�o�b�O������傫�����コ���邾���łȂ��A���{�b�g���ǂ̂悤�Ɏ��͂�F�����A�s�������肵�Ă���̂��𗝉����鏕���ɂ��Ȃ�܂��B
���{�b�g�J���ɂ����ăV�~�����[�^�[�́A���@�̑���ɓ��������߂̕⏕�I�ȑ��݂ł͂Ȃ��A���{�b�g���ǂ̂悤�ɐ��E��F�����A���f���A�����Ă���̂��𗝉����邽�߂̏d�v�ȊJ�����ł��B
ROS 2�Ƒg�ݍ��킹�邱�ƂŁA���@�Ƃقړ����\�t�g�E�F�A�\���ň��S�������I�Ɏ��s������d�˂邱�Ƃ��ł��A�������Ȓi�K�ł��J����O�ɐi�߂��܂��B
�V�~�����[�^�[�Ŋ�{�I�ȋ�������荞�݁A���@�ōŏI�I�Ȋm�F���s���B���̗����O��Ƃ����J�����A���ꂩ��̃��{�b�g�J���ł͌������Ȃ����̂ɂȂ��Ă����ł��傤�B
2026�N5��
������� �������ʐM�G���W�j�A�����O
�G���W�j�A�����O���ƕ� ��4�{�� ��2���@�l�{ ����
���ҏW�E���M�����̋L���̂��߁A���݂̏��ƈقȂ�ꍇ������܂��B�ҏW�E���M�̎����ɂ��ẮA�L���������������������B